ESP32 - Capteur d'évitement d'obstacles
Dans ce guide, nous allons apprendre comment utiliser le capteur d’évitement d’obstacles infrarouge avec l’ESP32 et MicroPython pour détecter des obstacles. En détail, nous allons apprendre :
- Comment fonctionne le capteur d'évitement d'obstacles.
- Comment connecter le capteur d'évitement d'obstacles à l'ESP32
- Comment écrire du code MicroPython pour l'ESP32 afin de détecter un obstacle.
Préparation du matériel
Ou vous pouvez acheter les kits suivants:
| 1 | × | Kit de Démarrage DIYables ESP32 (ESP32 inclus) | |
| 1 | × | Kit de Capteurs DIYables (18 capteurs/écrans) |
À propos du capteur d'évitement d'obstacles IR
Le capteur d'obstacles infrarouge (IR) détecte les obstacles à l'aide d'un signal infrarouge. Il peut identifier des objets situés à une distance comprise entre 2 cm et 30 cm. La plage de détection peut être ajustée à l'aide d'un potentiomètre intégré.
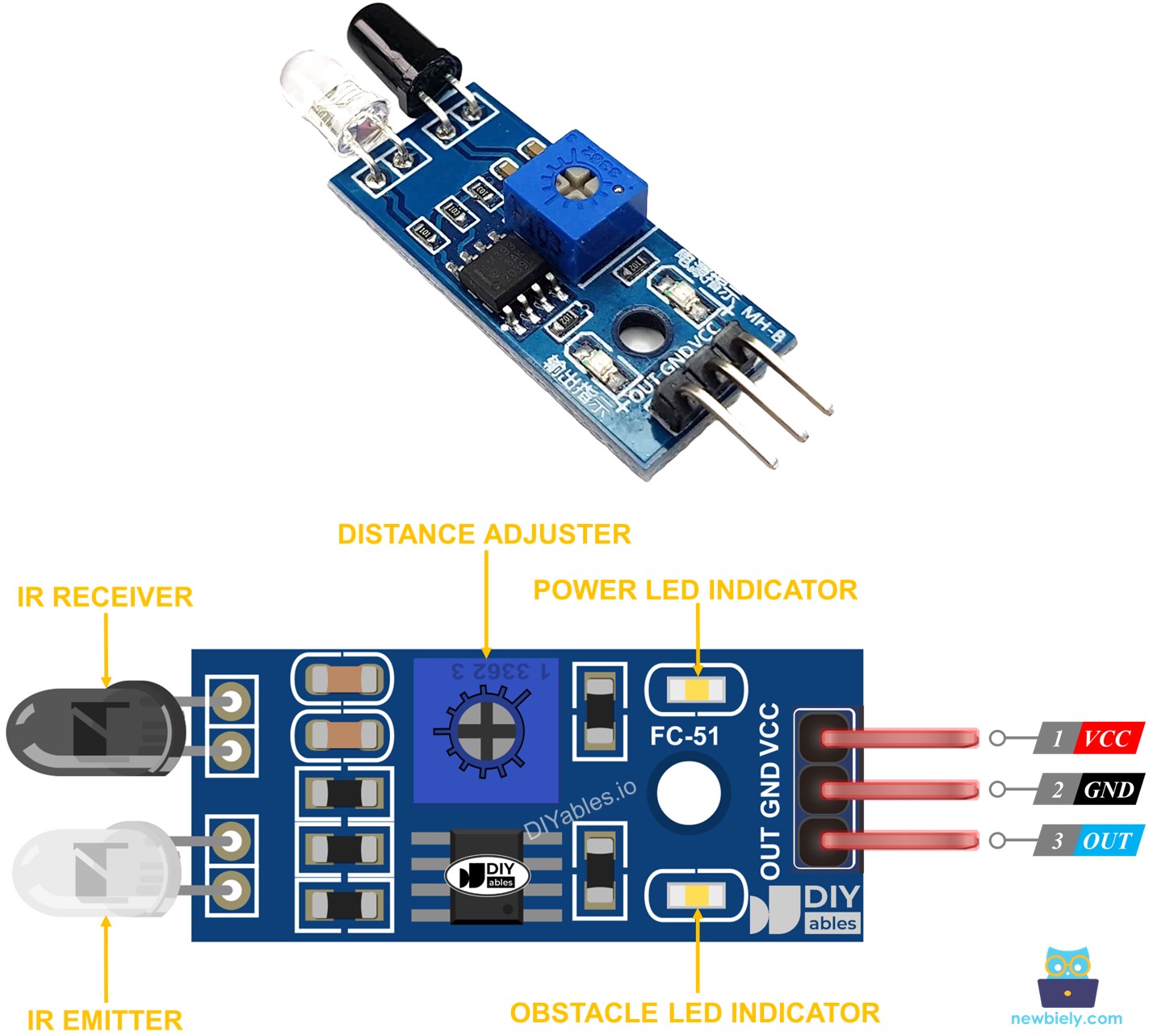
Plan de brochage
Le capteur d'évitement d'obstacles infrarouge comporte trois broches :
- Broche GND : Branchez-la à la masse (0 volt).
- Broche VCC : Branchez-la à une alimentation (5 volts ou 3,3 volts).
- Broche OUT : Cette broche de sortie passe à l'état bas lorsque un obstacle est détecté et à l'état haut lorsque aucun obstacle n'est présent. Branchez-la sur une broche d'entrée de l'ESP32.
Comment cela fonctionne
Un module capteur d'obstacles infrarouge contient un émetteur IR et un récepteur IR. L'émetteur IR émet un signal infrarouge, tandis que le récepteur IR détecte le signal réfléchi pour déterminer si un objet est présent. La présence d'un obstacle est indiquée par la broche OUT :
- Si un obstacle se trouve devant le capteur, la broche OUT est basse.
- Si aucun obstacle ne se trouve devant le capteur, la broche OUT est haute.
※ Note:
Le capteur peut se déformer pendant l'expédition, ce qui peut entraîner un dysfonctionnement. Si le capteur ne fonctionne pas correctement, ajustez l'émetteur et le récepteur IR afin de vous assurer qu'ils sont alignés parallèlement l'un à l'autre.
Diagramme de câblage
- Comment connecter l'ESP32 et le capteur d'évitement d'obstacles en utilisant breadboard
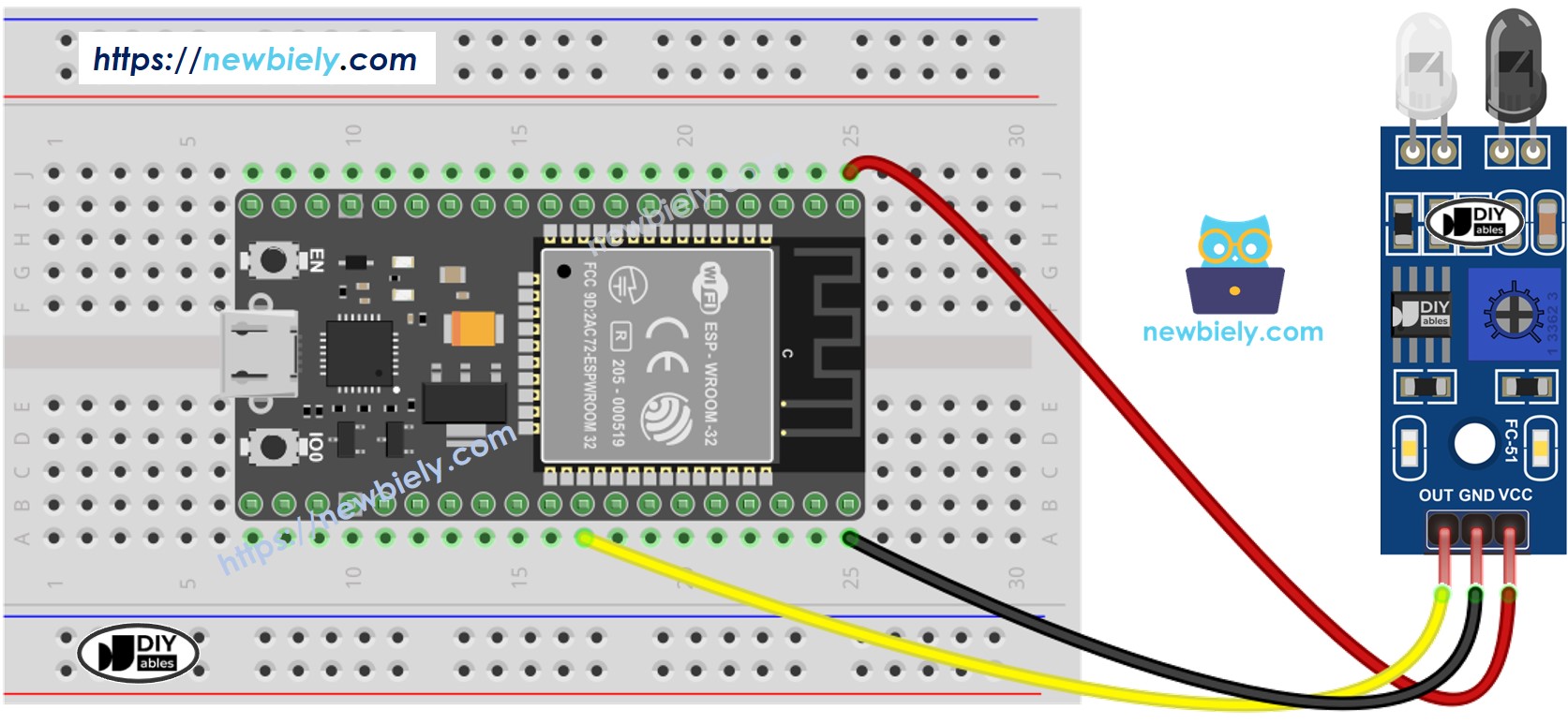
Cette image a été créée avec Fritzing. Cliquez pour agrandir l'image.
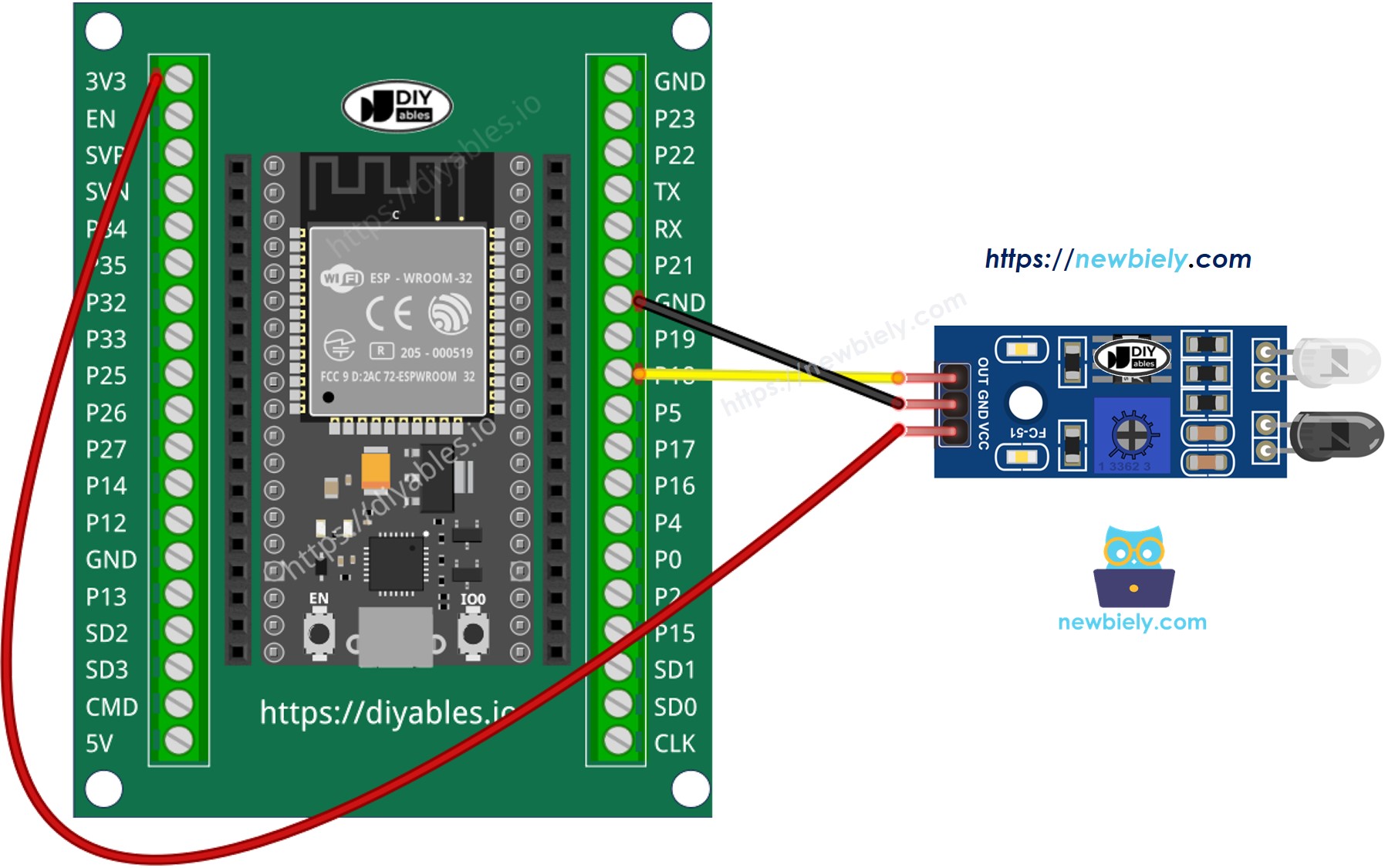
- Comment connecter l'ESP32 et le capteur d'évitement d'obstacles en utilisant carte d'extension à bornes à vis
Code MicroPython pour ESP32
Il existe deux approches pour programmer une application d’évitement d’obstacles :
- Exécuter ou ignorer une action en fonction de la présence ou de l'absence de l'obstacle.
- Exécuter ou ignorer une action lorsque l'obstacle est détecté ou dégagé.
Code MicroPython ESP32 pour vérifier si l'obstacle est présent
Étapes rapides
Voici les instructions pour configurer et exécuter votre code MicroPython sur l'ESP32 en utilisant l'IDE Thonny :
- Assurez-vous que Thonny IDE est installé sur votre ordinateur.
- Confirmez que le firmware MicroPython est chargé sur votre carte ESP32.
- Si c'est votre première utilisation d'un ESP32 avec MicroPython, consultez le guide ESP32 - Premiers pas. pour des instructions étape par étape.
- Branchez le capteur d'évitement d'obstacles à l'ESP32 selon le schéma fourni.
- Connectez la carte ESP32 à votre ordinateur avec un câble USB.
- Ouvrez Thonny IDE sur votre ordinateur.
- Dans Thonny IDE, allez dans Outils Options.
- Sous l'onglet Interpréteur, choisissez MicroPython (ESP32) dans le menu déroulant.
- Assurez-vous que le bon port est sélectionné. Thonny IDE le détecte généralement automatiquement, mais vous devrez peut-être le sélectionner manuellement (comme COM12 sous Windows ou /dev/ttyACM0 sous Linux).
- Copiez le code MicroPython fourni et collez-le dans l'éditeur de Thonny.
- Enregistrez le code sur votre ESP32 en procédant comme suit :
- En cliquant sur le bouton Enregistrer ou en appuyant sur Ctrl+S.
- Dans la boîte de dialogue d'enregistrement, choisissez périphérique MicroPython.
- Nommez le fichier main.py.
- Cliquez sur le bouton vert Exécuter (ou appuyez sur F5) pour exécuter le script.
- Placez un obstacle devant le capteur pendant un moment, puis retirez-le.
- Consultez le message dans le Shell en bas de Thonny.
Code MicroPython ESP32 pour détecter un obstacle
Étapes rapides
- Copiez le code MicroPython fourni et collez-le dans l'éditeur de Thonny.
- Enregistrez le code sur votre ESP32.
- Cliquez sur le bouton vert Exécuter (ou appuyez sur F5) pour exécuter le script.
- Mettez quelque chose devant le capteur brièvement, puis retirez-le.
- Consultez le message dans le Shell en bas de Thonny.