ESP32 - joystick
Ce tutoriel vous explique comment utiliser un joystick avec l'ESP32 et MicroPython. En détail, nous allons apprendre :
- Comment fonctionne un joystick
- Comment connecter un joystick à un ESP32
- Comment écrire du code MicroPython pour l'ESP32 afin de lire les valeurs du joystick
- Comment écrire du code MicroPython pour l'ESP32 afin de traduire les données du joystick en données utiles (comme des coordonnées XY ou les directions des moteurs)
Préparation du matériel
Ou vous pouvez acheter les kits suivants:
| 1 | × | Kit de Démarrage DIYables ESP32 (ESP32 inclus) | |
| 1 | × | Kit de Capteurs DIYables (18 capteurs/écrans) |
À propos de Joystick
Vous avez peut-être vu un joystick utilisé pour contrôler des jeux, des jouets ou même de grandes machines comme des excavatrices. Le joystick se compose de deux potentiomètres disposés en carré et d'un bouton. Il fournit les sorties suivantes :
- Une plage de 0 à 4095 pour la position horizontale (de gauche à droite).
- Une plage de 0 à 4095 pour la position verticale (de haut en bas).
- L'état du bouton, soit allumé (NIVEAU ÉLEVÉ) ou éteint (NIVEAU FAIBLE).
En combinant les deux valeurs analogiques, le joystick génère des coordonnées en 2D qui sont centrées lorsque le joystick est au repos. Vous pouvez déterminer la direction réelle de ces coordonnées à l’aide d’un code de test, que nous aborderons dans la section suivante. Certaines applications peuvent utiliser les trois sorties, tandis que d’autres n’en utilisent que quelques-unes.
Schéma des broches
Un joystick a cinq broches:
- GND pin : Se connecte à la masse (0 V).
- VCC pin : Se connecte à l'alimentation en 3,3 V de l'ESP32.
- VRX pin : Fournit une valeur analogique pour la position horizontale (coordonnée X) ; connectez cette broche à une broche ADC sur l'ESP32.
- VRY pin : Fournit une valeur analogique pour la position verticale (coordonnée Y) ; connectez cette broche à une broche ADC sur l'ESP32.
- SW pin : Connectée au bouton-poussoir du joystick, qui est normalement ouvert. Utilisez une résistance de tirage (pull-up) pour maintenir cette broche à un niveau élevé lorsque le bouton n'est pas enfoncé et à un niveau bas lorsqu'il est enfoncé.

Comment ça fonctionne
- Mouvement gauche/droite:
- Déplacer le joystick vers la gauche ou vers la droite modifie la tension sur la broche VRX.
- Le déplacer vers la gauche réduit la tension à 0 volt, tandis que le déplacer vers la droite augmente la tension à 3,3 volts.
- L'ESP32 mesure cette tension et la convertit en un nombre entre 0 et 4095, où 0 volt correspond à 0 et 3,3 volts correspond à 4095.
- Mouvement haut/bas:
- Déplacer le joystick vers le haut ou vers le bas affecte la tension sur la broche VRY.
- Le déplacer vers le haut diminue la tension à 0 volt, et le déplacer vers le bas augmente la tension à 3,3 volts.
- L'ESP32 lit cette tension et la convertit en un nombre entre 0 et 4095, similaire à la broche VRX.
- Mouvements combinés:
- Déplacer le joystick dans n'importe quelle direction modifie la tension sur les broches VRX et VRY, selon sa position sur chacun des axes.
- Appuyer sur le joystick :
- Appuyer sur le joystick vers le bas active un bouton interne.
- Une résistance de tirage vers le haut connectée à la broche SW fait chuter la tension de 3,3 volts à 0 volt lorsqu'on appuie.
- L'ESP32 l'interprète comme un signal numérique, lisant HIGH (3,3 volts) lorsque non appuyé et LOW (0 volt) lorsque appuyé.
Lorsque le joystick est déplacé, il ajuste les tensions sur les broches VRX et VRY, que l'ESP32 lit comme des valeurs allant de 0 à 4095. En appuyant sur le joystick, la tension sur la broche SW change, et l'ESP32 détecte ce changement comme HIGH ou LOW.
Diagramme de câblage
- Comment connecter l'ESP32 et un joystick en utilisant breadboard
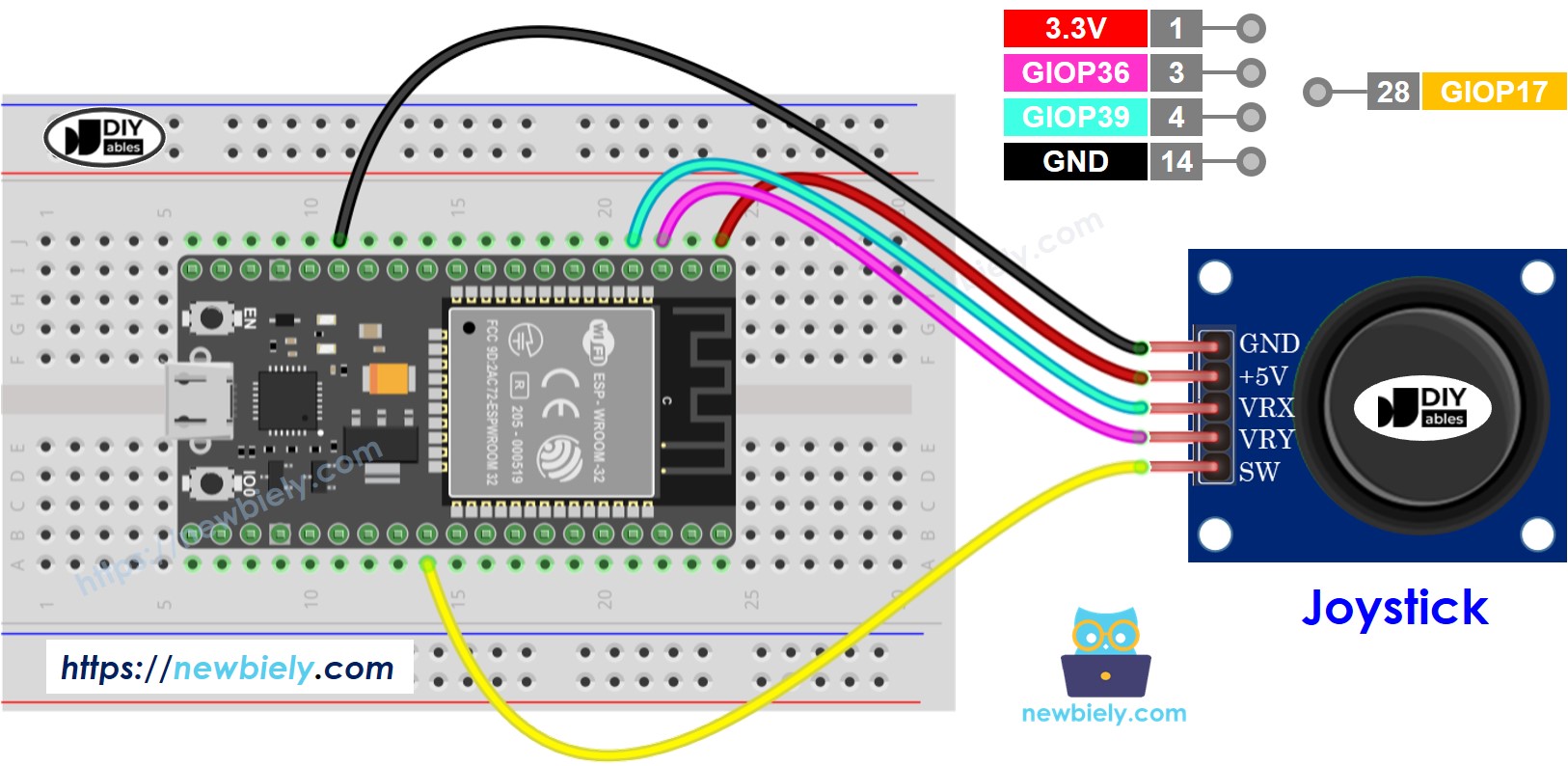
Cette image a été créée avec Fritzing. Cliquez pour agrandir l'image.
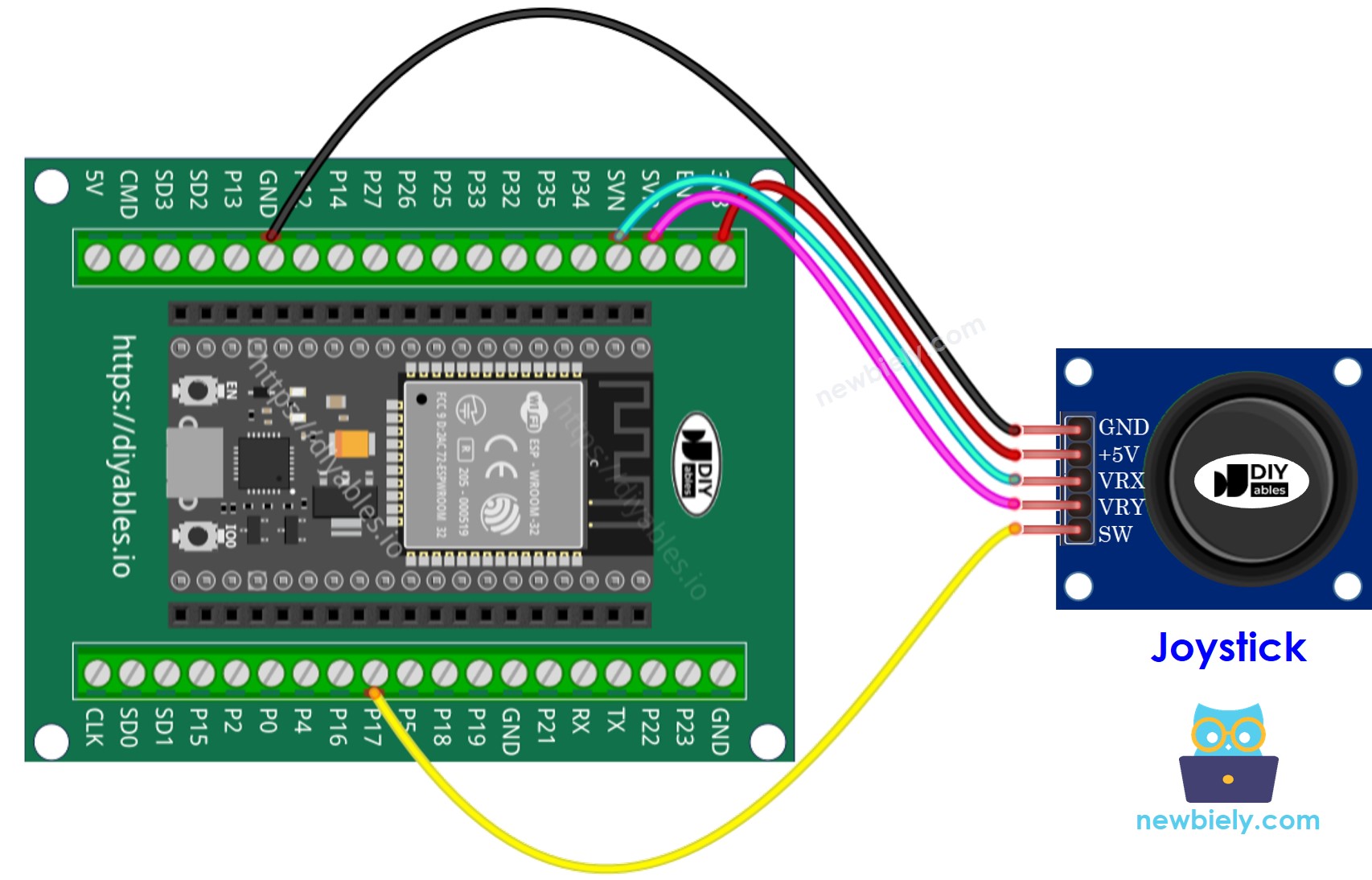
- Comment connecter l'ESP32 et le joystick en utilisant carte d'extension avec bornes à vis
Comment programmer pour un joystick
Heureusement, DIYables a développé une bibliothèque de joystick qui simplifie grandement le processus d'utilisation d'un joystick avec l'ESP32.
Code MicroPython ESP32 - Lit l'état du joystick
Le script MicroPython suivant :
- Lit les valeurs analogiques d'un joystick.
- Vérifie si le stick analogique du joystick est enfoncé ou relâché.
- Lit le nombre d'appuis sur le stick analogique du joystick.
Étapes rapides
Voici les instructions pour configurer et exécuter votre code MicroPython sur l’ESP32 en utilisant l’IDE Thonny :
- Assurez-vous que l’IDE Thonny est installé sur votre ordinateur.
- Confirmez que le firmware MicroPython est chargé sur votre carte ESP32.
- Si c’est la première fois que vous utilisez un ESP32 avec MicroPython, consultez le guide ESP32 - Premiers pas. pour des instructions étape par étape.
- Connectez le joystick à l’ESP32 selon le schéma fourni.
- Connectez la carte ESP32 à votre ordinateur avec un câble USB.
- Ouvrez l’IDE Thonny sur votre ordinateur.
- Dans l’IDE Thonny, allez dans Outils Options.
- Dans l’onglet Interpréteur, choisissez MicroPython (ESP32) dans le menu déroulant.
- Assurez-vous que le port correct est sélectionné. L’IDE Thonny le détecte généralement automatiquement, mais vous devrez peut-être le sélectionner manuellement (par exemple COM12 sous Windows ou /dev/ttyACM0 sous Linux).
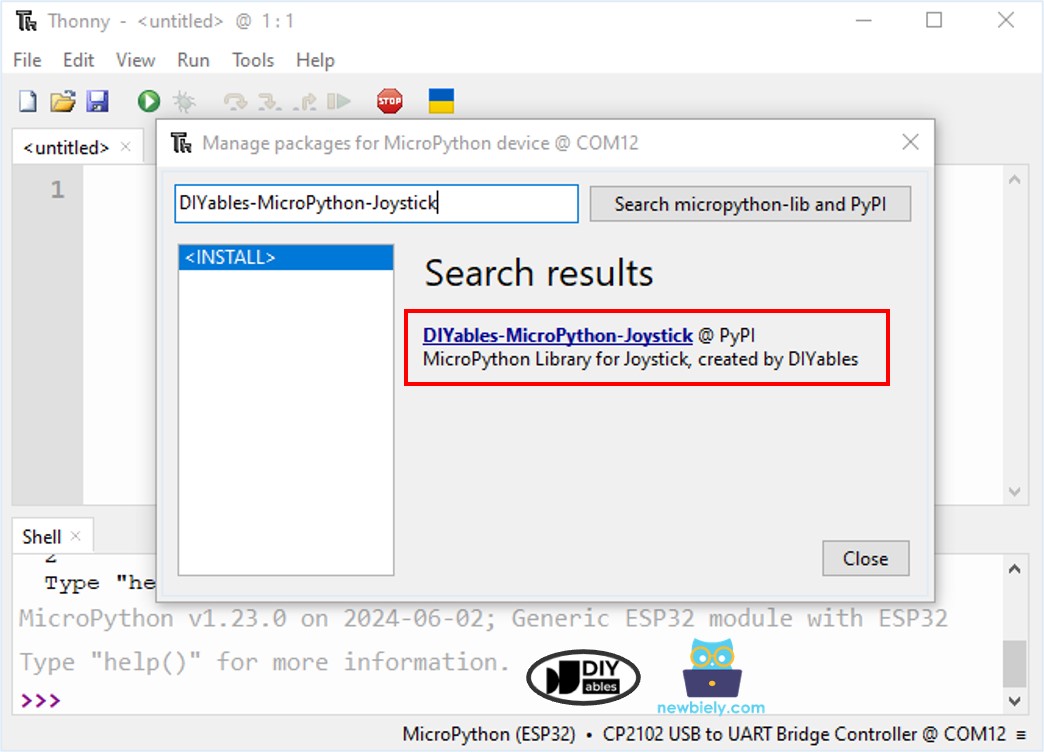
- Accédez à Outils Gérer les paquets dans l’IDE Thonny.
- Recherchez “DIYables-MicroPython-Joystick”, puis trouvez la bibliothèque Joystick créée par DIYables.
- Cliquez sur DIYables-MicroPython-Joystick, puis cliquez sur le bouton Install pour installer la bibliothèque Joystick.
- Copiez le code MicroPython fourni et collez-le dans l'éditeur de Thonny.
- Enregistrez le code sur votre ESP32 en procédant comme suit :
- Cliquez sur le bouton Enregistrer ou appuyez sur Ctrl+S.
- Dans la boîte de dialogue d'enregistrement, choisissez l'appareil MicroPython.
- Nommez le fichier main.py.
- Cliquez sur le bouton vert Exécuter (ou appuyez sur F5) pour exécuter le script.
- Faites glisser le joystick vers la gauche, vers la droite, vers le haut ou vers le bas.
- Appuyez vers le bas sur le dessus du joystick.
- Consultez le message dans le Shell en bas de Thonny.
Lors de l'utilisation du joystick, observez le message dans le Shell en bas de Thonny. Si la valeur X est 0, cela indique une position à gauche ; sinon, cela indique à droite. Si la valeur Y est 0, cela représente une position vers le haut ; sinon, cela indique vers le bas.
Gardez à l'esprit que, bien que la plage théorique des valeurs X/Y soit de 0 à 4095, en pratique, les valeurs peuvent ne pas atteindre ces extrêmes en raison des caractéristiques mécaniques du joystick. Cette variation est normale et acceptable pour la plupart des applications.
※ Note:
Ce tutoriel montre comment utiliser la fonction adc.read() pour lire des valeurs depuis un ADC (convertisseur analogique-numérique) connecté à un joystick. L'ADC de l'ESP32 est adapté pour des projets qui ne nécessitent pas une grande précision. Cependant, si votre projet nécessite des mesures précises, gardez à l'esprit ce qui suit:
- L'ADC de l'ESP32 n'est pas parfaitement précis et peut nécessiter une calibration pour des résultats précis. Chaque carte ESP32 peut varier légèrement, il est donc nécessaire de calibrer chaque carte individuellement.
- La calibration peut être difficile, surtout pour les débutants, et peut ne pas toujours donner exactement les résultats souhaités.
Pour les projets nécessitant une grande précision, envisagez d'utiliser un ADC externe (par exemple ADS1115) avec l'ESP32 ou optez pour un Arduino, qui dispose d'un ADC plus fiable. Si vous souhaitez tout de même calibrer l'ADC de l'ESP32, reportez-vous au ESP32 ADC Calibration Driver.
Convertit une valeur analogique en commandes de déplacement vers la gauche/droite/haut/bas
Le code MicroPython ci-dessous convertit les valeurs analogiques en commandes : MOVE_LEFT, MOVE_RIGHT, MOVE_UP, MOVE_DOWN.
Étapes rapides
- Copiez le code ci-dessus et collez-le dans l'éditeur de l'IDE Thonny.
- Enregistrez le script sur votre carte ESP32.
- Cliquez sur le bouton vert Exécuter (ou appuyez sur F5) pour exécuter le script.
- Déplacez le joystick vers la gauche, vers la droite, vers le haut, vers le bas, ou dans n'importe quelle direction.
- Consultez le message dans le Shell en bas de Thonny.
※ Note:
Il peut ne pas y avoir de commande, une commande, ou même deux commandes en même temps, comme HAUT et GAUCHE ensemble.
Convertit des valeurs analogiques en angles pour contrôler deux servomoteurs
Découvrez les détails dans ce tutoriel ESP32 - joystick - servomoteur..